Festo仿生袋鼠——原生高效的跳躍運動學(xué)
Festo的仿生袋鼠在技術(shù)上實現(xiàn)了袋鼠的運動方式。在每次跳躍的時候能夠恢復(fù)和存儲能量,用來作下一次跳躍,就跟真實的袋鼠一樣。
- E5 t7 p* U, s獨特運動方式的技術(shù)實現(xiàn)
在仿生袋鼠的上,F(xiàn)esto綜合利用了氣動和電動驅(qū)動技術(shù)來完成這個高動態(tài)系統(tǒng)的設(shè)計。穩(wěn)定的跳躍運動學(xué)加上精確的控制技術(shù)使得袋鼠在跳躍和落地過程中都很穩(wěn)定。輕量結(jié)構(gòu)設(shè)計使得實現(xiàn)這種獨特的跳躍變?yōu)榭赡堋U麄€系統(tǒng)還是由手勢控制的。
9 Z a6 r. y* e9 d, q1 m移動式隨身能源供應(yīng)
Festo在仿生袋鼠的移動能源供應(yīng)上極其重視。為了實現(xiàn)移動式供能,設(shè)計團隊提出了兩個思路——一種是集成式壓縮機,一種思路是裝高壓儲氣裝置。
+ l/ i" o7 p# ~/ L, R' O
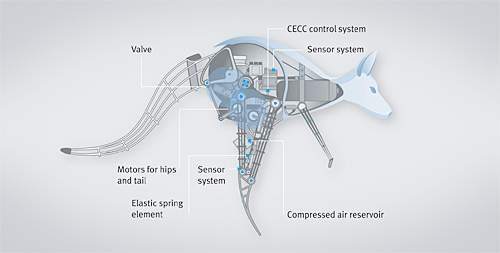 9 M8 s3 ^! z% H1 [$ w8 e圖1.
9 M8 s3 ^! z% H1 [$ w8 e圖1. 完整的高復(fù)雜系統(tǒng)概覽:集成式驅(qū)動,控制技術(shù)和移動式能源供應(yīng)
2 L, Y$ ~# U2 F- L
 # Q; j r" l1 `1 n
# Q; j r" l1 `1 n
圖2. 上帝的版本:袋鼠和它獨特的構(gòu)造
 ! L& m! h- m5 G" [) L3 }% ?9 C7 F
! L& m! h- m5 G" [) L3 }% ?9 C7 F
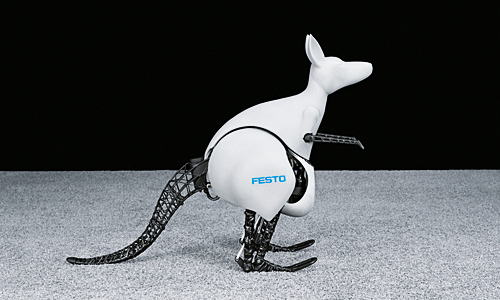
圖3. 人類的仿生版本:仿生袋鼠的技術(shù)實現(xiàn)
 6 T1 U0 G% ]' z, W* t) S. `4 O5 w7 U* G
6 T1 U0 G% ]' z, W* t) S. `4 O5 w7 U* G
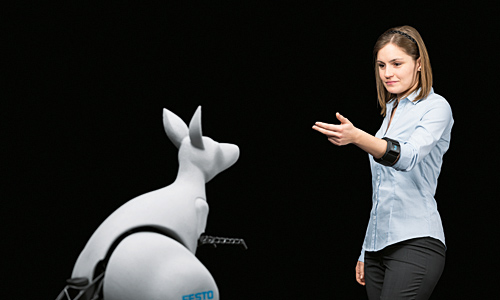
圖4. 簡單的操控:用臂環(huán)實現(xiàn)手勢控制
 7 k. u0 Y( x" g( N5 b9 b
7 k. u0 Y( x" g( N5 b9 b
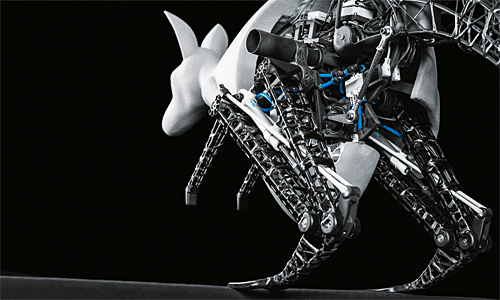
圖5. 優(yōu)化排布設(shè)計:功能模塊在有限空間內(nèi)的集成
 4 B* F* r6 @4 T2 @# r
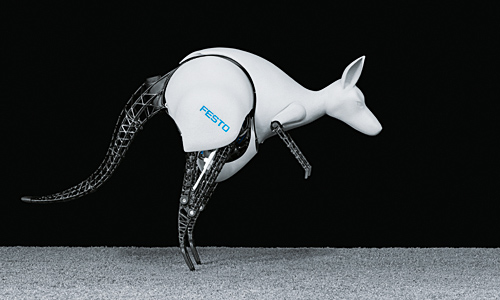
4 B* F* r6 @4 T2 @# r圖6. 動態(tài)起跳:氣動驅(qū)動技術(shù)可以提供強大的跳躍能量
 4 B& S# y! X" @6 U; I
4 B& S# y! X" @6 U; I
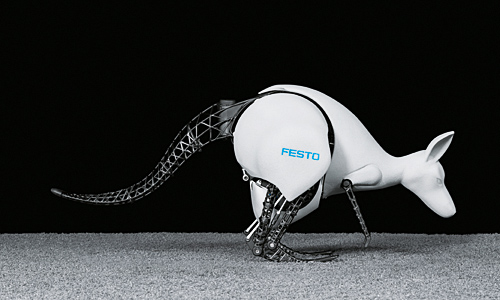
圖7. 高效的著落:為下一次跳躍存儲能量
3 w# f( p8 }# R# U2 t. L 