|
發布時間: 2023-3-30 09:45
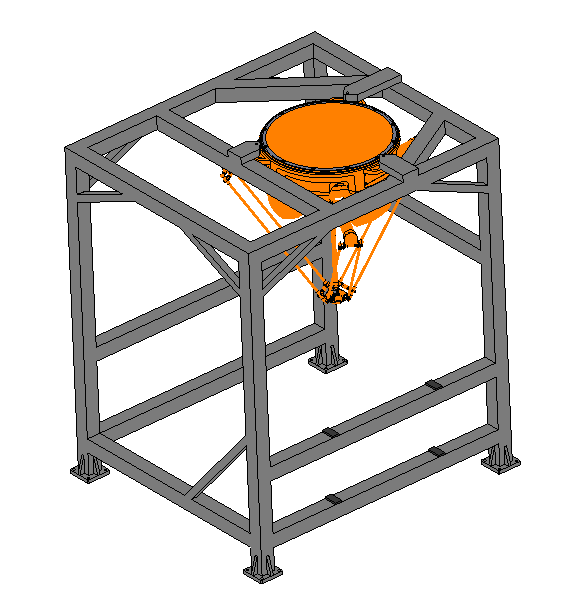
正文摘要:做了一個柔性抓取的案例,用的ABB的蜘蛛手機器人,機架底部已經打了32個M8的地腳螺絲固定,但是機器人速度提升上來之后機架還是會晃動,不知道是什么原因導致的,有沒有高手幫忙看一下問題出在哪里,機架結構是否靠 ... |
| 底盤要穩 |
| 配重 |
| 架子灌水泥 |
| 跟機器人加速度有關系,機架的重量也是根據加速度,運動部件的重量來匹配的 |
| 樓主解決了嗎,我正好在想機架穩定性問題,光從材料方面說有沒有什么可以參考的。之前的設備用型材搭的架子,抓取重物在上面跑就像蕩秋千一樣,一般都說加大加粗,可是加到多大比較合適,既不浪費又能解決問題。 |
| 方管小了 |
|
80方管有點浪費,60的方管足夠了; 框架需要增加豎立的支承,同事,機器人不能安裝在懸臂上,最好安裝在固定板上 |
|
接觸面小了,下面墊一層橡膠 然后鎖上去 |
|
架子剛度不夠,三角撐要對角,方鋼壁厚? |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-9-15 08:28 , Processed in 0.072090 second(s), 21 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.