|
發(fā)布時(shí)間: 2010-8-31 13:48
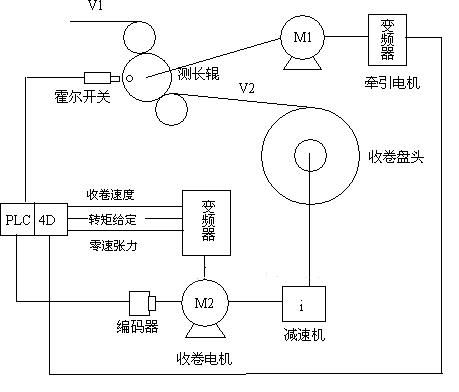
正文摘要:# U2 o3 c4 H0 R2 E" i! F 這是一個(gè)恒張力收卷的控制原理圖,因?yàn)槲沂菍W(xué)機(jī)械的,對(duì)控制部分了解不多,有兩個(gè)問(wèn)題想請(qǐng)教 z1 Q# o4 n" U$ R3 c! y7 x 1、請(qǐng)問(wèn)PLC旁邊的4D指的是什么?為什么牽引電機(jī)的變 ... |
| 看來(lái)電器方面的知識(shí)懂得人比較多哦 |
| 按現(xiàn)有的資料看可以這樣理解 |
| 4D是PLC的4路輸出模塊,一路是控制牽引變頻器的轉(zhuǎn)速,不是反饋。霍爾傳感器是測(cè)量已卷板長(zhǎng)的,每個(gè)脈沖走過(guò)固定的長(zhǎng)度。 |
| 圖中的4D應(yīng)該是FX2N-4DA(如果是三菱的話),輸出4路0~10V模擬信號(hào)以控制變頻器的速度。 |
|
霍爾傳感器在這里的作用應(yīng)該是測(cè)量拉力的,并且將拉力A/D值送到PLC通過(guò)調(diào)節(jié)變頻器的頻率進(jìn)行閉環(huán)控制。 如圖7所示,兩塊永久磁鐵同極性相對(duì)放置,將線性型霍爾傳感器置于中間,其磁感應(yīng)強(qiáng)度為零,這個(gè)點(diǎn)可作為位移的零點(diǎn),當(dāng)霍爾傳感器在Z軸上作△Z位移時(shí),傳感器有一個(gè)電壓輸出,電壓大小與位移大小成正比。 如果把拉力、壓力等參數(shù)變成位移,便可測(cè)出拉力及壓力的大小,如圖8所示,是按這一原理制成的力傳感器。 |
| 參與人數(shù) 1 | 威望 +20 | 收起 理由 |
|---|---|---|
|
| + 20 |
| 沒(méi)見(jiàn)過(guò)這種設(shè)備 ,從圖上看4D應(yīng)該是PLC的模擬模塊,因?yàn)镻LC能處理的是數(shù)字量,而收卷速度屬于模擬量。霍爾開(kāi)關(guān)是測(cè)速的,從圖上看輸出應(yīng)該還是數(shù)字量的。個(gè)人觀點(diǎn),希望對(duì)你有幫助。 |
| 參與人數(shù) 1 | 威望 +10 | 收起 理由 |
|---|---|---|
|
| + 10 |
Archiver|手機(jī)版|小黑屋|機(jī)械社區(qū) ( 京ICP備10217105號(hào)-1,京ICP證050210號(hào),浙公網(wǎng)安備33038202004372號(hào) )
GMT+8, 2025-9-22 04:23 , Processed in 0.084162 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.