|
發布時間: 2018-8-23 11:50
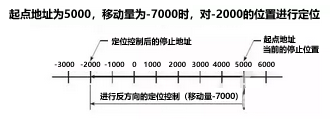
正文摘要:3 [4 n1 v3 y4 q/ W L/ A4 }, } 在進行伺服定位操作之前,一般都需要先進行原點回歸,否則伺服電機不能正常工作,會報警提示「原點回歸未完成時啟動」。 / F4 J; y8 L5 A* K9 M+ s2 o( u$ Z4 F0 o+ F; {( ... |
| 請樓主回復3樓的問題,學習學習 |
| 看來樓主是一個高手呀, |
| 666學習了 |
|
學習 |
| 求教樓主一個關于伺服的問題 我現在用伺服帶動優力膠滾輪 壓緊電纜 記旋轉的圈數來定電纜長度 進度正負0.5mm 可以實現嗎 每次都需要回歸原點嗎需要原點 |
破碎重組 發表于 2018-8-23 12:499 i: n2 Q3 B" Y3 f- H/ ^7 h8 q 絕對值編碼器分單圈和多圈,主要區別就是測量范圍的不同,單圈編碼器只能測量一圈以內的位置或是角度,測量角度也就是0-360°以內,超過一圈后編碼器的數據會從0開始循環,無法測量大于360°外的角度值;多圈編碼器因為內部有機械齒輪計圈,數據根據圈數累計計算,所以可以測量多圈的角度,市場上大部分都是4096圈的,也就是測量角度值可以達到360°*4096=1474560° 一般用多圈編碼器測量行程,用來定位比較多 |
| 學習了 |
| 好文章。可惜沒多少回復的。 |
| 以前大學時候,金工實習還沒接觸過數控,但是要操作,為了方便記憶,我當時個人的理解是機器運行后,不知道走在哪個位置,回原點,就有了坐標依據 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-9-27 06:19 , Processed in 0.079177 second(s), 22 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.