|
發布時間: 2019-3-14 12:25
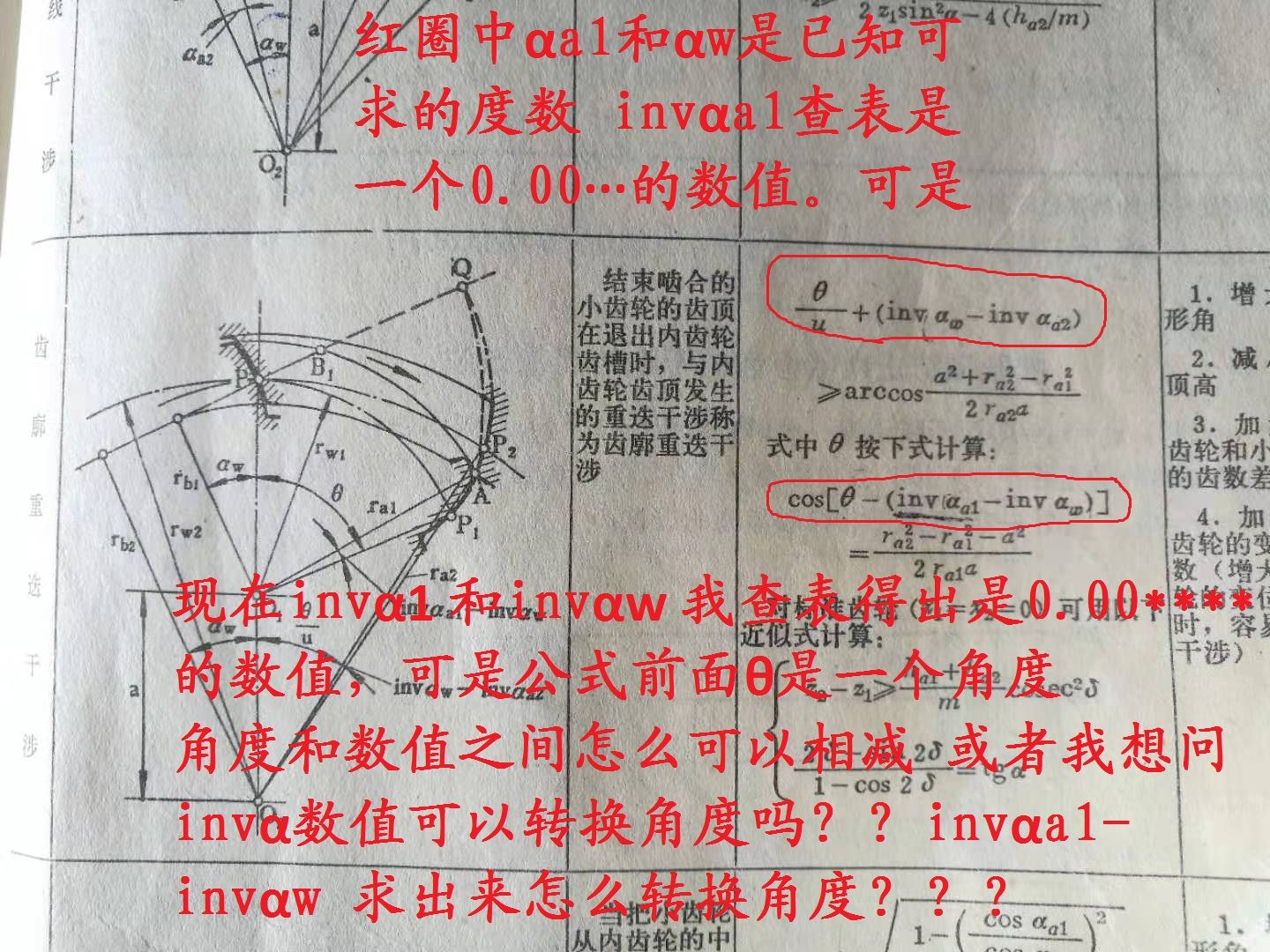
正文摘要:公式中 invαa1-invαw 量數值相減 是直接用還是轉換角度 如果轉換角度 怎么轉換角度 我現在不知道 漸開線函數表格里的值 到底是什么 ... |
zmztx 發表于 2019-3-15 18:04 我到級數了 咱家 加好友 互相交流 |
本帖最后由 zmztx 于 2019-3-16 07:24 編輯 我叫劉有福 發表于 2019-3-15 16:44 哎,如果是從這里開始,那齒輪的準確設計及其計算,可是千難萬難 內嚙合要比外嚙合難不少,即便可以熟練計算外嚙合,不見得難算的了內嚙合 如果學的都忘了,《齒輪機構設計與應用》李華敏,很新,下載也方便。就是講齒輪傳動的幾何計算等,基本不涉及強度等 推薦的幾本書有個特點,錯誤比較少,包括印刷錯誤等。齒輪方面的書籍、文章中錯誤,達到了難以想象的程度,說文章篇篇有錯可能是過分了,但沒錯的是鳳毛麟角,甚至GB國家標準里都有印刷錯誤 朱景梓、李華敏、吳序堂等教授的書,錯誤少或者沒有 |
zmztx 發表于 2019-3-15 15:53 親 我看了 88年的一本老書 上面很詳細說明了 漸開線函數 invα=tanα-α這個公式的推到由來 |
我叫劉有福 發表于 2019-3-15 13:19 我覺得內嚙合比較好的書 朱景梓、張展 寫的內嚙合齒輪傳動。 汪萍 寫的插齒變位系數封閉圖 作者的名字肯定對,書名不一定對。上網查一下就知道了 估計你遇到的是內嚙合齒輪傳動的幾何計算問題,這兩本書寫的好。最重要的是可以在網上下載 |
zmztx 發表于 2019-3-14 21:41 體會到了你所說的無比麻煩 真心的 麻煩 好幾天了  我也已經理解了 謝謝你 |
遠祥 發表于 2019-3-14 19:57 謝謝 我已經找到資料 理解了 |
遠祥 發表于 2019-3-14 19:57 其實,這里涉及的只是三角函數和漸開線函數,是基本的概念 至于計算,是可以簡化的。就是去查三角函數表和漸開線函數表 齒輪計算,公式之多大概沒什么人能記得全,只有靠查手冊了 問題是,在計算機輔助設計中,有時候查表并不方便,所以把一些表(如漸開線函數表)變成計算機程序,這樣一來就需要一些概念十分清楚,不然怎么轉化成程序 進一步,計算機計算多為數值計算,誤差也是允許的。于是又有了問題,雖然可以把精確的計算公式交給計算機完成,可是這樣一來,計算時間太長,人可能無法忍受。所以還要對復雜的計算公式做工作,把特定的一些精確計算,轉化成簡單的數據擬合曲線(這大概就是你說的模擬),而這曲線是用解析式給出的。恰恰在齒輪計算中,復雜的計算實在太多了。比如選變位系數的電子封閉圖、齒輪強度計算中載荷修正系數(Kv)、齒根強度計算中齒形系數,等等。無比麻煩。所以做成數據擬合曲線,計算就簡單多了,也快多了。但是,概念必須特別清楚。 想簡單,就需要付出代價。 齒輪計算,即便是機械系畢業的,也頭痛啊!絕非戲言 |
| 感覺復雜,是否可以通過數模模擬,從而減小工作量! |
本帖最后由 zmztx 于 2019-3-14 21:22 編輯 我叫劉有福 發表于 2019-3-14 16:35 θ-(invα1-invαw) 是49 度 那么49°是怎么算出來的?難道不是θ角、α1小齒輪的壓力角、αw嚙合角都是已知?如果是,直接將θ角轉換為角度,這時的θ角是弧度 如果不是,那你把49°轉為弧度;根據α1小齒輪的壓力角、αw嚙合角,把漸開線函數值算出來;再把θ角的弧度值算出來;最后,算出θ角的角度值 |
zmztx 發表于 2019-3-14 16:04 目前我的cos (一大堆) 值是0.656951109 可以求出來arccos0.656951109 是49度 說明θ-(invα1-invαw) 是49 度 現在想求θ度數 |
Archiver|手機版|小黑屋|機械社區 ( 京ICP備10217105號-1,京ICP證050210號,浙公網安備33038202004372號 )
GMT+8, 2025-9-29 03:16 , Processed in 0.069957 second(s), 21 queries , Gzip On.
Powered by Discuz! X3.5 Licensed
© 2001-2025 Discuz! Team.